11.1: Dreidimensionale Koordinatensysteme
In der Einvariablenrechnung sind die Funktionen, denen man begegnet, Funktionen einer Variablen (gewöhnlich \(x\) oder \(t\)), die über eine Teilmenge der reellen Zahlengeraden variiert (die wir mit \(\mathbb{R}\) bezeichnen). Für eine solche Funktion, sagen wir \(y = f(x)\), besteht der \(\textbf{graph}\) der Funktion \(f\) aus den Punkten \((x, y) = (x, f(x))\). Diese Punkte liegen in der \(\textbf{Euklidischen Ebene}\), die im \(\textbf{kartesischen}\) oder \(\textbf{rechteckigen}\) Koordinatensystem aus allen geordneten Paaren von reellen Zahlen \((a, b)\) besteht. Wir verwenden das Wort „Euklidisch“, um ein System zu bezeichnen, in dem alle üblichen Regeln der euklidischen Geometrie gelten. Wir bezeichnen die euklidische Ebene mit \(\mathbb{R}^{2}\); die „2“ steht für die Anzahl der \(\textit{dimensions}\) der Ebene. Die euklidische Ebene hat zwei senkrechte \(\textbf{Koordinatenachsen}\): die \(x\)-Achse und die \(y\)-Achse.
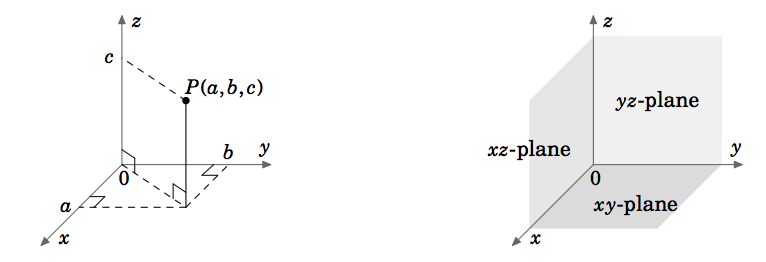
In der Vektor- (oder Multivariablen-)rechnung befassen wir uns mit Funktionen von zwei oder drei Variablen (gewöhnlich \(x, y\) bzw. \(x, y, z\)). Der Graph einer Funktion von zwei Variablen, z. B. \(z = f(x,y)\), liegt im euklidischen Raum, der im kartesischen Koordinatensystem aus allen geordneten Dreiergruppen von reellen Zahlen \((a, b, c)\) besteht. Da der euklidische Raum 3-dimensional ist, bezeichnen wir ihn mit \(\mathbb{R}^{3}\). Der Graph von \(f\) besteht aus den Punkten \((x, y, z) = (x, y, f(x, y))\). Das dreidimensionale Koordinatensystem des euklidischen Raums kann auf einer ebenen Fläche, wie dieser Seite oder einer Tafel, nur dadurch dargestellt werden, dass die Illusion von drei Dimensionen vermittelt wird, wie in Abbildung 1.1.1 gezeigt. Der euklidische Raum hat drei zueinander senkrecht stehende Koordinatenachsen (\(x, y\) und \(z\)) und drei zueinander senkrecht stehende Koordinatenebenen\index{plane!Koordinaten}: die \(xy\)-Ebene, die \(yz\)-Ebene und die \(xz\)-Ebene (Abbildung 1.1.2).
Das Koordinatensystem in Abbildung 1.1.1 wird als \(\textbf{Rechtshänder-Koordinatensystem}) bezeichnet, weil es möglich ist, mit der rechten Hand den Zeigefinger in die positive Richtung der \(x\)-Achse, den Mittelfinger in die positive Richtung der \(y\)-Achse und den Daumen in die positive Richtung der \(z\)-Achse zu richten, wie in Abbildung 1.1.3.
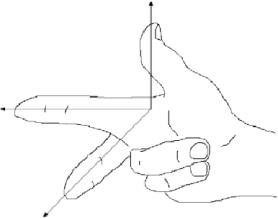
Abbildung 1.1.3: Rechtshändiges Koordinatensystem.
Eine äquivalente Möglichkeit, ein rechtshändiges System zu definieren, besteht darin, den Daumen in Richtung der positiven \(z\)-Achse nach oben zu richten, während man mit den übrigen vier Fingern die \(x\)-Achse in Richtung der \(y\)-Achse dreht. Wenn man das Gleiche mit der linken Hand macht, entsteht ein \(\textbf{linkshändiges Koordinatensystem}). Beachten Sie, dass das Vertauschen der \(x\)- und \(y\)-Achse in einem rechtshändigen System zu einem linkshändigen System führt, und dass die Drehung eines der beiden Systeme seine „Händigkeit“ nicht ändert. Im gesamten Buch werden wir ein rechtshändiges System verwenden.
Für Funktionen von drei Variablen existieren die Graphen im 4-dimensionalen Raum (d.h. \(\mathbb{R}^{4}\)), den wir in unserem 3-dimensionalen Raum nicht sehen können, geschweige denn im 2-dimensionalen Raum simulieren können. Wir können uns den 4-dimensionalen Raum also nur abstrakt vorstellen. Eine unterhaltsame Erörterung dieses Themas finden Sie in dem Buch von ABBOT.
Bislang haben wir die \(\textit{position}\) eines Objekts im 2-dimensionalen oder 3-dimensionalen Raum diskutiert. Aber was ist mit so etwas wie der Geschwindigkeit des Objekts oder seiner Beschleunigung? Oder die auf das Objekt wirkende Gravitationskraft? Diese Phänomene scheinen alle in irgendeiner Weise mit Bewegung und \(\textit{direction}\) zu tun zu haben. Hier kommt die Idee eines \(\textit{vector}\) ins Spiel.
Sie haben sich bereits mit Geschwindigkeit und Beschleunigung in der Ein-Variablen-Rechnung beschäftigt. Wenn zum Beispiel bei einer Bewegung entlang einer Geraden \(y = f(t)\) die Verschiebung eines Objekts nach der Zeit \(t\) angibt, dann ist \(dy/dt = f\,'(t)\) die Geschwindigkeit des Objekts zur Zeit \(t\). Die Ableitung \(f\,'(t)\) ist einfach eine Zahl, die positiv ist, wenn sich das Objekt in eine vereinbarte „positive“ Richtung bewegt, und negativ, wenn es sich entgegengesetzt zu dieser Richtung bewegt. Man kann sich also vorstellen, dass diese Zahl, die als Geschwindigkeit des Objekts bezeichnet wurde, zwei Komponenten hat: eine \(\Textit{Magnitude}\), angegeben durch eine nicht negative Zahl, der eine Richtung vorangestellt ist, angegeben durch ein Plus- oder Minus-Symbol (das für eine Bewegung in die positive bzw. negative Richtung steht), d. h. \(f\,'(t) = \pm a\) für eine Zahl \(a \ge 0\). Dann ist \(a\) der Betrag der Geschwindigkeit (normalerweise als \(\Textit{Geschwindigkeit}\) des Objekts bezeichnet), und \(\pm\) stellt die Richtung der Geschwindigkeit dar (obwohl das \(+\) für die positive Richtung normalerweise weggelassen wird).
Für die Bewegung entlang einer geraden Linie, d.h. in einem eindimensionalen Raum, sind die Geschwindigkeiten auch in diesem eindimensionalen Raum enthalten, da sie nur Zahlen sind. Für eine allgemeine Bewegung entlang einer Kurve im 2- oder 3-dimensionalen Raum muss die Geschwindigkeit jedoch durch ein mehrdimensionales Objekt dargestellt werden, das sowohl einen Betrag als auch eine Richtung haben sollte. Ein geometrisches Objekt, das diese Eigenschaften besitzt, ist ein Pfeil, der in der elementaren Geometrie als „gerichtetes Liniensegment“ bezeichnet wird. Dies ist die Motivation dafür, wie wir einen Vektor definieren werden.
Definition 1.1
Ein (ungleich Null) \(\textbf{Vektor}\) ist ein gerichteter Linienabschnitt, der von einem Punkt \(P\) (genannt sein \(\textbf{Anfangspunkt}\)) zu einem Punkt \(Q\) (genannt sein \(\textbf{Endpunkt}\)) gezogen wird, wobei \(P\) und \(Q\) verschiedene Punkte sind. Der Vektor wird mit \(\overrightarrow{PQ}\) bezeichnet. Sein \(\textbf{Magnitude}\) ist die Länge des Liniensegments, das mit \(\norm{\overrightarrow{PQ}}\) bezeichnet wird, und sein \(\textbf{direction}\) ist die gleiche wie die des gerichteten Liniensegments. Der \(\textbf{Nullvektor}\) ist nur ein Punkt und wird mit \(\textbf{0}\) bezeichnet.
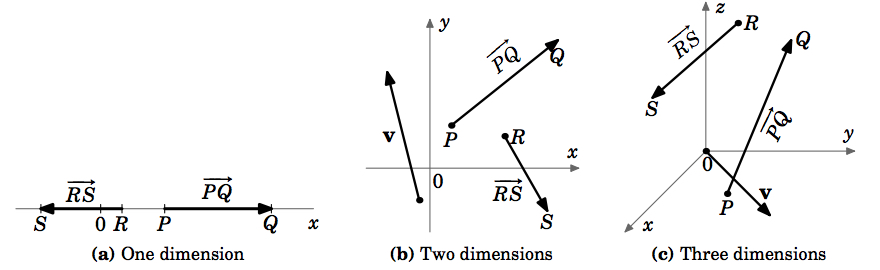
Um die Richtung eines Vektors anzugeben, zeichnen wir einen Pfeil von seinem Anfangspunkt zu seinem Endpunkt. Wir werden einen Vektor oft mit einem einzelnen fettgedruckten Buchstaben bezeichnen (z.B. \(\textbf{v}\)) und die Begriffe „Magnitude“ und „Länge“ austauschbar verwenden. Beachten Sie, dass unsere Definition auf Systeme mit einer beliebigen Anzahl von Dimensionen angewendet werden kann (Abbildung 1.1.4 (a)-(c)).
Ein paar Dinge müssen über den Nullvektor beachtet werden. Bei der Erläuterung, was ein Vektor ist, haben wir die Begriffe Größe und Richtung berücksichtigt. Was ist der Betrag des Nullvektors? Wir definieren ihn als Null, d. h. \(\norm{\textbf{0}} = 0\). Dies stimmt mit der Definition des Nullvektors als Punkt überein, der die Länge Null hat. Was ist mit der Richtung des Nullvektors? Ein einzelner Punkt hat eigentlich keine wohldefinierte Richtung. Beachten Sie, dass wir darauf geachtet haben, nur die Richtung eines Vektors zu definieren, der wohldefiniert ist, da der Anfangs- und der Endpunkt unterschiedlich sind. Nicht alle sind sich über die Richtung des Nullvektors einig. Einige behaupten, dass der Nullvektor eine \(\textit{arbitrary}\)-Richtung hat (d.h. er kann jede beliebige Richtung annehmen), andere sagen, dass er eine \(\textit{indeterminate}\)-Richtung hat (d.h. die Richtung kann nicht bestimmt werden), während andere sagen, dass er eine \(\textit{no}\)-Richtung hat. Unsere Definition des Nullvektors verlangt jedoch nicht, dass er eine Richtung hat, und wir belassen es dabei.
Nachdem wir nun wissen, was ein Vektor ist, brauchen wir eine Möglichkeit, um zu bestimmen, wann zwei Vektoren gleich sind. Dies führt uns zu der folgenden Definition.
Definition 1.2
Zwei Vektoren, die nicht Null sind, sind gleich, wenn sie denselben Betrag und dieselbe Richtung haben. Jeder Vektor mit dem Betrag Null ist gleich dem Nullvektor.
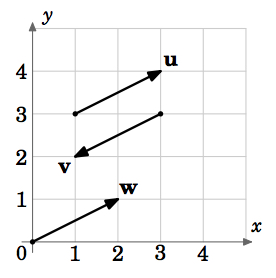
Nach dieser Definition sind Vektoren mit demselben Betrag und derselben Richtung, aber mit unterschiedlichen Anfangspunkten gleich. Zum Beispiel haben in Abbildung 1.1.5 die Vektoren \(\textbf{u}\), \(\textbf{v}\) und \(\textbf{w}\) alle den gleichen Betrag \(\sqrt{5}\) (durch den Satz des Pythagoras). Und wir sehen, dass \(\textbf{u}\) und \(\textbf{w}\) parallel sind, da sie auf Geraden mit derselben Steigung \(\frac{1}{2}\) liegen und in dieselbe Richtung zeigen. Also ist \(\textbf{u} = \textbf{w}\), auch wenn sie unterschiedliche Ausgangspunkte haben. Wir sehen auch, dass \(\textbf{v}\) parallel zu \(\textbf{u}\) ist, aber in die entgegengesetzte Richtung zeigt. Also \(\textbf{u} \ne \textbf{v}\).
Wir sehen also, dass es für einen gegebenen Betrag und eine gegebene Richtung eine unendliche Anzahl von Vektoren gibt, die alle gleich sind und sich nur durch ihren Anfangs- und Endpunkt unterscheiden. Gibt es einen einzigen Vektor, den wir wählen können, um alle diese gleichen Vektoren darzustellen? Die Antwort ist ja und wird durch den Vektor \(\textbf{w}\) in Abbildung 1.1.5 nahegelegt.
Wenn nicht anders angegeben, meinen wir, wenn wir von „dem Vektor“ mit einer bestimmten Größe und Richtung sprechen, denjenigen, dessen Anfangspunkt im Ursprung des Koordinatensystems liegt.
Die Vorstellung, dass Vektoren vom Ursprung ausgehen, ermöglicht einen einheitlichen Umgang mit Vektoren, da jedes Koordinatensystem einen Ursprung hat. Es kann jedoch vorkommen, dass es sinnvoll ist, einen anderen Ausgangspunkt für einen Vektor zu wählen (z. B. bei der Addition von Vektoren, die wir im nächsten Abschnitt vornehmen werden). Ein weiterer Vorteil der Verwendung des Ursprungs als Anfangspunkt ist, dass es eine einfache Entsprechung zwischen einem Vektor und seinem Endpunkt gibt.
Beispiel 1.1
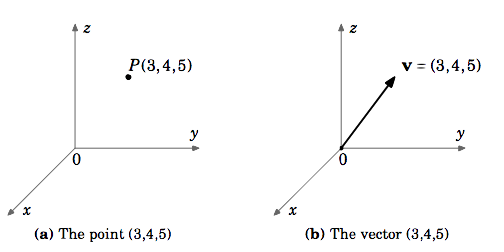
Sei \(\textbf{v}\) der Vektor in \(\mathbb{R}^{3}\), dessen Anfangspunkt im Ursprung liegt und dessen Endpunkt \((3,4,5)\) ist. Obwohl der \(\textit{point}\) \((3,4,5)\) und der Vektor \(\textbf{v}\) unterschiedliche Objekte sind, ist es bequem, \(\textbf{v} = (3,4,5)\) zu schreiben. Dabei wird davon ausgegangen, dass der Anfangspunkt von \(\textbf{v}\) im Ursprung \((0,0,0)\) liegt und der Endpunkt \((3,4,5)\) ist.
Wenn nicht anders angegeben, bezeichnen wir Vektoren als \(\textbf{v} = (a,b)\) in \(\mathbb{R}^{2}\) oder \(\textbf{v} = (a,b,c)\) in \(\mathbb{R}^{3}\) bezeichnen, meinen wir Vektoren in kartesischen Koordinaten, die im Ursprung beginnen. Außerdem schreiben wir den Nullvektor \(\textbf{0}\) in \(\mathbb{R}^{2}\) und \(\mathbb{R}^{3}\) als \((0,0)\) bzw. \((0,0,0)\).
Die Punkt-Vektor-Korrespondenz bietet eine einfache Möglichkeit zu prüfen, ob zwei Vektoren gleich sind, ohne dass man ihren Betrag und ihre Richtung bestimmen muss. Ähnlich wie bei der Prüfung, ob zwei Punkte gleich sind, prüft man nun, ob die Endpunkte von Vektoren, die im Ursprung beginnen, gleich sind. Finde für jeden Vektor den (einzigen!) Vektor, dessen Anfangspunkt der Ursprung ist. Vergleichen Sie dann die Koordinaten der Endpunkte dieser „neuen“ Vektoren: Wenn diese Koordinaten gleich sind, dann sind die ursprünglichen Vektoren gleich. Um die „neuen“ Vektoren zu erhalten, die im Ursprung beginnen, subtrahiert man die Koordinaten des ursprünglichen Anfangspunktes vom ursprünglichen Endpunkt, so dass jeder Vektor im Ursprung beginnt. Der resultierende Punkt ist der Endpunkt des „neuen“ Vektors, dessen Anfangspunkt der Ursprung ist. Führen Sie dies für jeden ursprünglichen Vektor durch und vergleichen Sie dann.
Beispiel 1.2
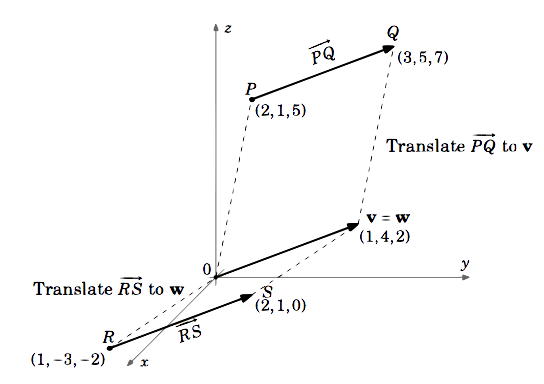
Betrachte die Vektoren \(\overrightarrow{PQ}\) und \(\overrightarrow{RS}\) in \(\mathbb{R}^{3}\), wobei \(P = (2,1,5), Q = (3,5,7), R = (1,-3,-2)\) und \(S = (2,1,0)\). Ist \(\overrightarrow{PQ} = \overrightarrow{RS}\)?
Der Vektor \(\overrightarrow{PQ}\) ist gleich dem Vektor \(\textbf{v}\) mit Anfangspunkt \((0,0,0)\) und Endpunkt \(Q – P = (3,5,7) – (2,1,5) = (3 – 2,5 – 1,7 – 5) = (1,4,2)\).
Gleichermaßen ist \(\overrightarrow{RS}\) gleich dem Vektor \(\textbf{w}\) mit Anfangspunkt \((0,0,0)\) und Endpunkt \(S – R = (2,1,0) – (1,-3,-2) = (2 – 1, 1 – (-3),0 – (-2)) = (1,4,2)\).
So \(\overrightarrow{PQ} = \textbf{v} = (1,4,2)\) und \(\overrightarrow{RS} = \textbf{w} = (1,4,2)\).
\(\daher \überrechtPfeil{PQ} = \überrechtPfeil{RS}\)
Erinnern Sie sich an die Abstandsformel für Punkte in der euklidischen Ebene:
Für Punkte \(P = (x_{1}, y_{1})\), \(Q = (x_{2}, y_{2})\) in \(\mathbb{R}^{2}\), ist der Abstand \(d\) zwischen \(P\) und \(Q\):
\
Durch diese Formel erhalten wir folgendes Ergebnis:
Hinweis
Für einen Vektor \(\overrightarrow{PQ}\) in \(\mathbb{R}^{2}\) mit Anfangspunkt \(P = (x_{1}, y_{1})\) und Endpunkt \(Q = (x_{2}, y_{2})\), ist der Betrag von \(\overrightarrow{PQ}\):
\
Die Bestimmung des Betrags eines Vektors \(\textbf{v} = (a,b)\) in \(\mathbb{R}^{2}\) ist ein Spezialfall der obigen Formel mit \(P = (0,0)\) und \(Q = (a,b)\):
Für einen Vektor \(\textbf{v} = (a,b)\) in \(\mathbb{R}^{2}\), ist der Betrag von \(\textbf{v}\):
\
Um den Betrag von Vektoren in \(\mathbb{R}^{3}\) zu berechnen, brauchen wir eine Abstandsformel für Punkte im euklidischen Raum (wir verschieben den Beweis auf den nächsten Abschnitt):
Theorem 1.1
Der Abstand \(d\) zwischen Punkten \(P = (x_{1}, y_{1}, z_{1})\) und \(Q = (x_{2}, y_{2}, z_{2})\) in \(\mathbb{R}^{3}\) ist:
\
Der Beweis wird das folgende Ergebnis verwenden:
Theorem 1.2
Für einen Vektor \(\textbf{v} = (a,b,c)\) in \(\mathbb{R}^{3}\), ist der Betrag von \(\textbf{v}\):
\
Beweis: Es sind vier Fälle zu betrachten:
\(\textit{Fall 1:}\) \(a = b = c = 0\). Dann \(\textbf{v} = \textbf{0}\), also \(\norm{\textbf{v}} = 0 = \sqrt{0^{2} + 0^{2} + 0^{2}} = \sqrt{a^{2} + b^{2} + c^{2}}\).
\(\textit{Fall 2:}\) \(\textit{exakt zwei von }\)\(a, b, c\) sind \(0\). Ohne Verlust der Allgemeingültigkeit nehmen wir an, dass \(a = b = 0\) und \(c \ne 0\) sind (die beiden anderen Möglichkeiten werden auf ähnliche Weise behandelt). Dann ist \(\textbf{v} = (0,0,c)\), ein Vektor der Länge \(|c|\) entlang der \(z\)-Achse. Also \(\norm{\textbf{v}} = | c | = \sqrt{c^{2}} = \sqrt{0^{2} + 0^{2} + c^{2}} = \sqrt{a^{2} + b^{2} + c^{2}}).
\(\textit{Fall 3:}\) \(a, b, c\) ist \(0\). Ohne Verlust der Allgemeingültigkeit nehmen wir an, dass \(a = 0\), \(b \ne 0\) und \(c \ne 0\) ist (die beiden anderen Möglichkeiten werden auf ähnliche Weise behandelt). Dann ist \(\textbf{v} = (0,b,c)\) ein Vektor in der \(yz\)-Ebene, und nach dem Satz des Pythagoras haben wir \(\norm{\textbf{v}} = \sqrt{b^{2} + c^{2}} = \sqrt{0^{2} + b^{2} + c^{2}} = \sqrt{a^{2} + b^{2} + c^{2}}).
\(a, b, c\) sind \(0\). Ohne Verlust der Allgemeingültigkeit können wir annehmen, dass \(a, b, c\) alle positiv sind (die anderen sieben Möglichkeiten werden auf ähnliche Weise behandelt). Man betrachte die Punkte \(P = (0,0,0)\), \(Q = (a,b,c)\), \(R =(a,b,0),\) und \(S = (a,0,0)\), wie in Abbildung 1.1.8 dargestellt. Die Anwendung des Satzes von Pythagoras auf das rechtwinklige Dreieck \(\Dreieck PSR\) ergibt \(\links\vert PR \right\vert^{2} = a^{2} + b^{2}\). Eine zweite Anwendung des Satzes von Pythagoras, diesmal auf das rechtwinklige Dreieck \(\Dreieck PQR\), ergibt \(\norm{\textbf{v}} = \left\lvert PQ \right\rvert = \sqrt{\left\vert PR \right\vert^{2} + \left\vert QR \right\vert^{2}} = \sqrt{a^{2} + b^{2} + c^{2}}\). Dies beweist das Theorem.
\(\tag{\(\textbf{QED}\)}\)
Beispiel 1.3
Berechnen Sie Folgendes:
- Der Betrag des Vektors \(\overrightarrow{PQ}\) in \(\mathbb{R}^{2}\) mit \(P = (-1,2)\) und \(Q = (5,5)\).
\(\textit{Lösung:}\) Nach Formel (1.2), \(\norm{\overrightarrow{PQ}} = \sqrt{(5 – (-1))^{2} + (5 – 2)^{2}} = \sqrt{36 + 9} = \sqrt{45} = 3 \sqrt{5}\). - Der Betrag des Vektors \(\textbf{v} = (8,3)\) in \(\mathbb{R}^{2}\).
\(\textit{Lösung:}\) Nach Formel (1.3), \(\norm{\textbf{v}} = \sqrt{8^{2} + 3^{2}} = \sqrt{73}\). - Der Abstand zwischen den Punkten \(P = (2, -1, 4)\) und \(Q = (4, 2, -3)\) in \(\mathbb{R}^{2}\).
\(\textit{Lösung:}\) Nach Formel (1.4) ist der Abstand \(d = \sqrt{(4 – 2)^{2} + (2 – (-1))^{2} + (-3 – 4)^{2}} = \sqrt{4 + 9 + 49} = \sqrt{62}\). - Der Betrag des Vektors \(\textbf{v} = (5,8,-2)\) in \(\mathbb{R}^{3}\).
\(\textit{Lösung:}) Nach Formel (1.5) ist \(\norm{\textbf{v}} = \sqrt{5^{2} + 8^{2} + (-2)^{2}} = \sqrt{25 + 64 + 4} = \sqrt{93}\).
Verfasser und Urheber
-
Michael Corral (Schoolcraft College). Der Inhalt dieser Seite wird unter den Bedingungen der GNU Free Documentation License, Version 1.2, verbreitet.